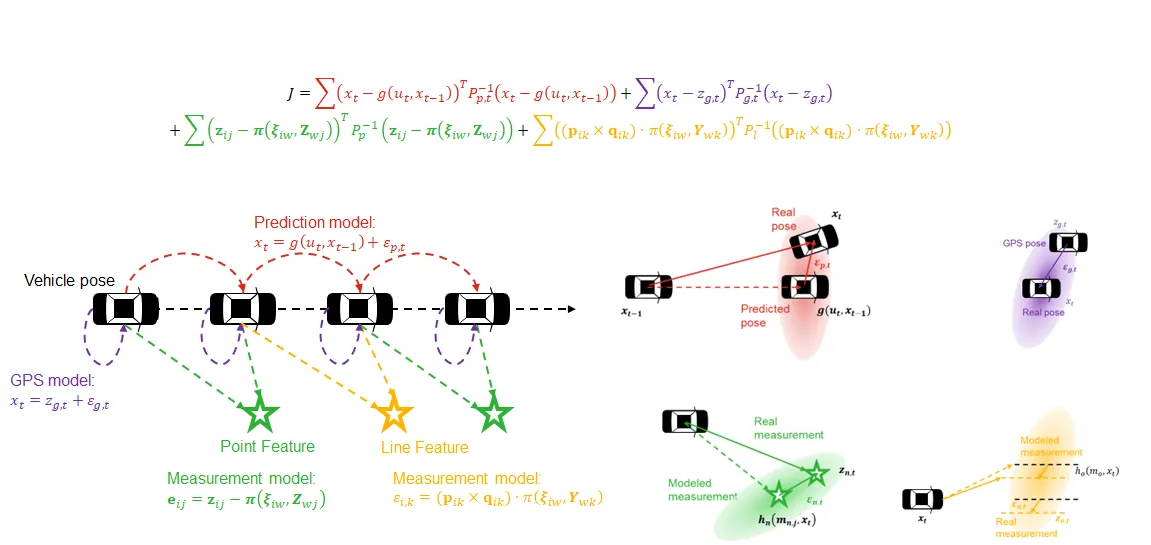
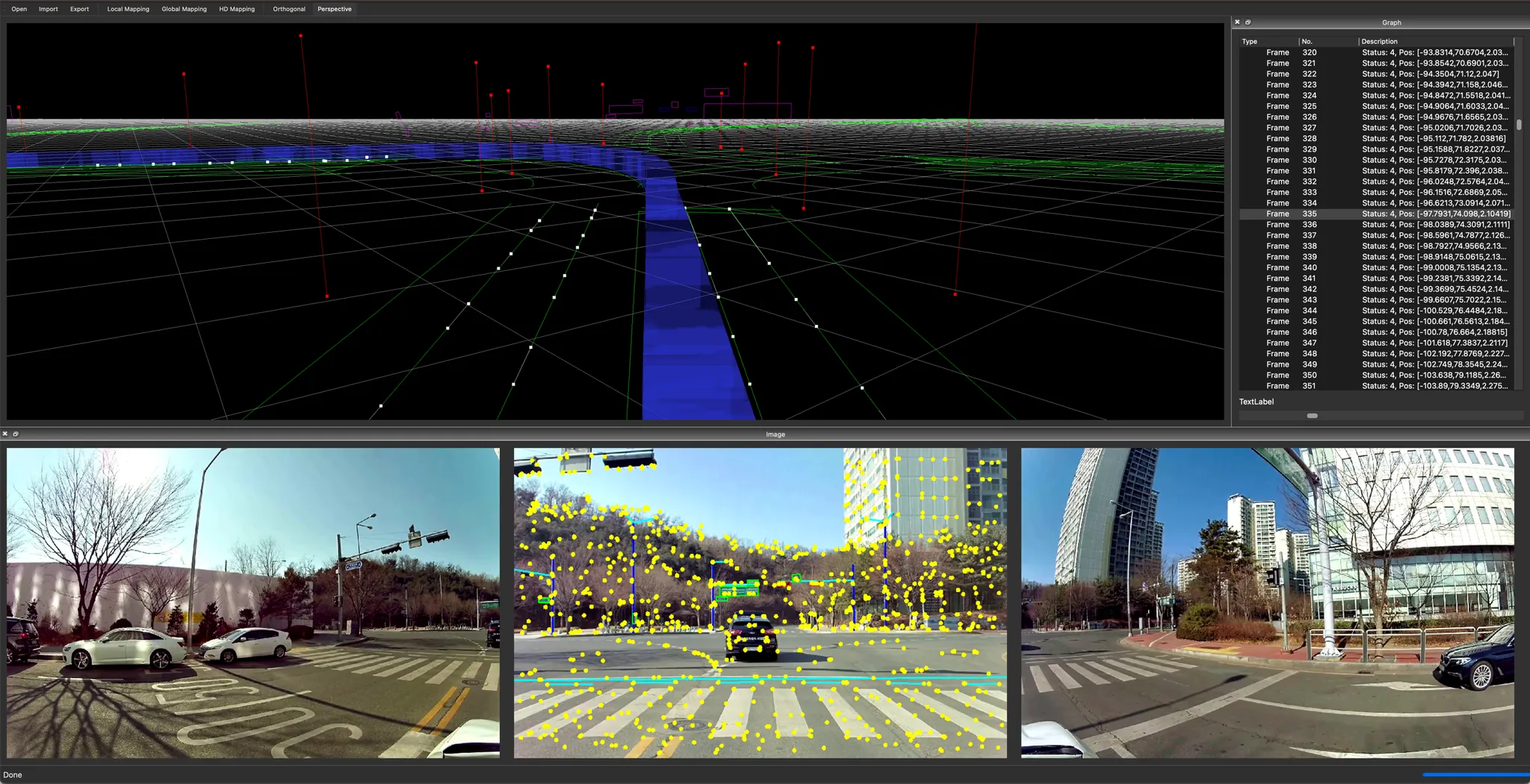
Visual SLAM
•
Hand-craft based features (ORB, SIFT) and AI based features (SuperPoint, M-LSD, YOLO)
•
Visual feature based odometry and loop closing
•
Point + Line based Simultanous Localization And Mapping
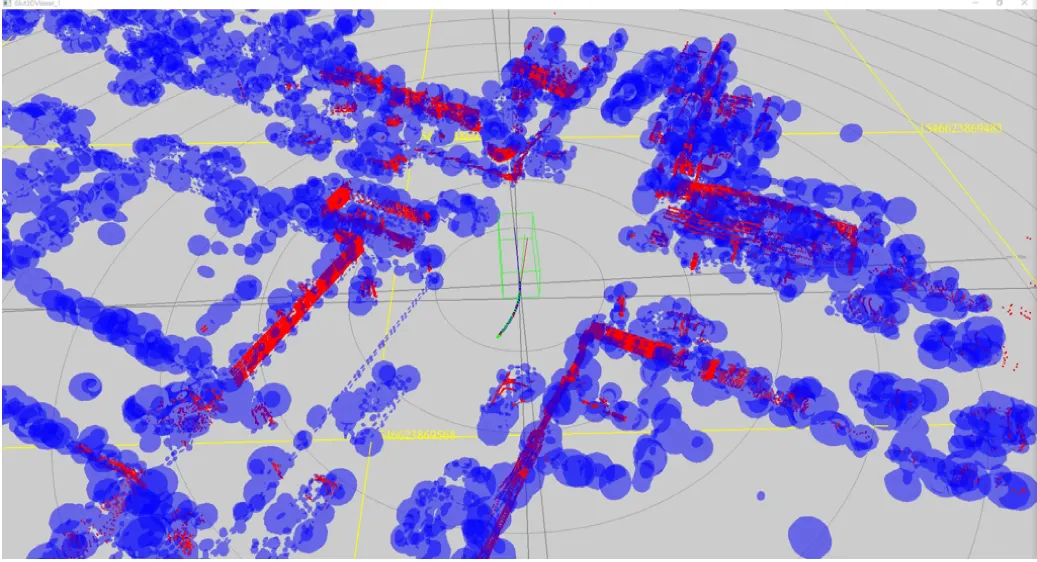
LiDAR-based SLAM
Geodetic Normal Distribution Map based Localization
•
GND map structure for map compression
•
Particle Filter and Kalman Filter based Localization in GND map structure
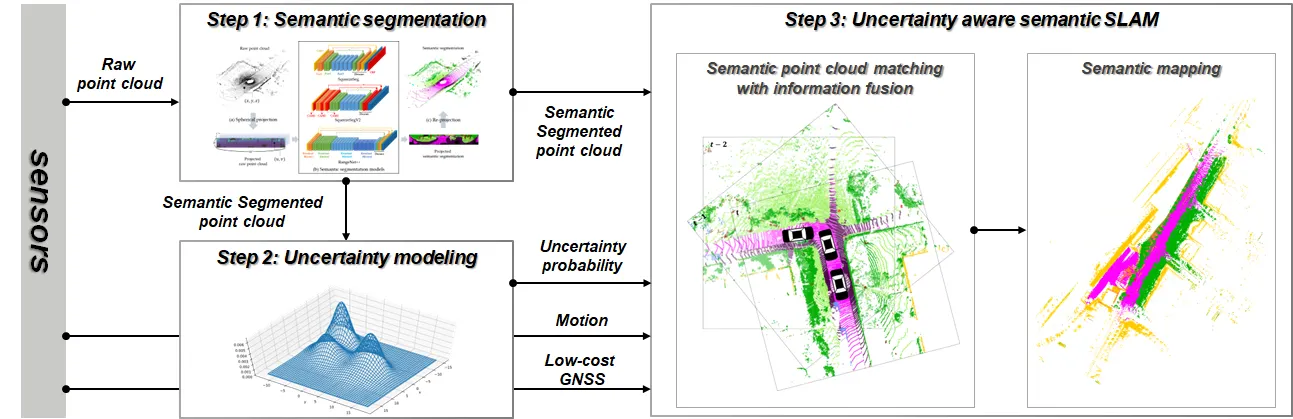
Semantic Point Cloud based SLAM
•
Deep learning-based semantic segmentation
•
Probabilistic uncertainty model of the semantic segmentation
•
Uncertainty model-based semantic SLAM using information fusion
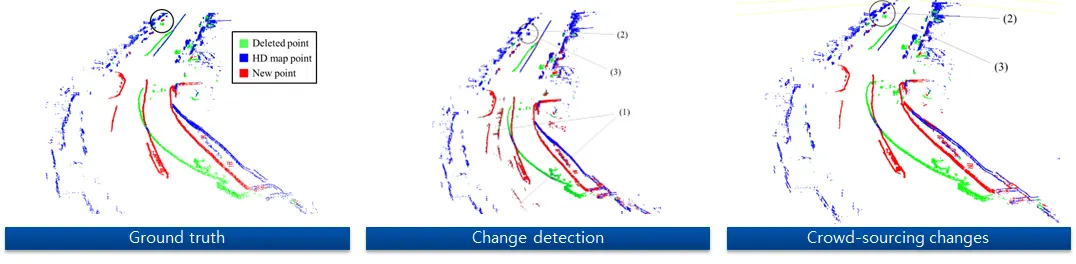
HD Map Update
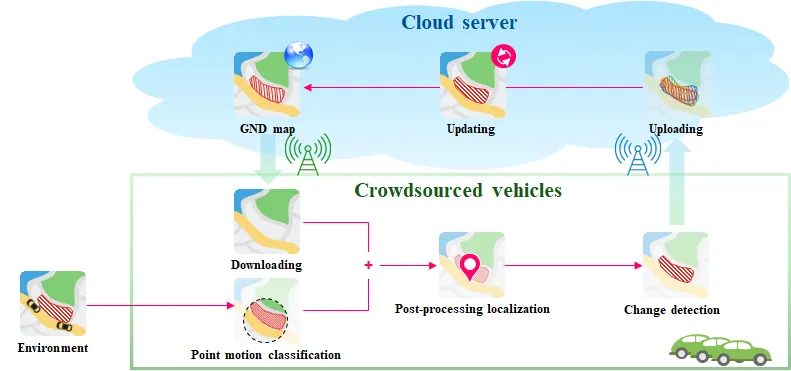
Geodetic Normal Distribution Map Update based on Crowdsourced changes
•
GND map structure for map compression
•
Change detection in the GND map against environment changes in crowdsourcing vehicles
•
GND map update based on crowdsourced map changes in the cloud server
Point Cloud Map Update based on Crowdsourced Changes
•
Point cloud map change detection based on ray-casting
•
Change merging based on Dempster-Shafer theory
•
Point cloud map update based on crowdsourced map changes in the cloud server