Semantic Segmentation
LiDAR-based Semantic Segmentation
•
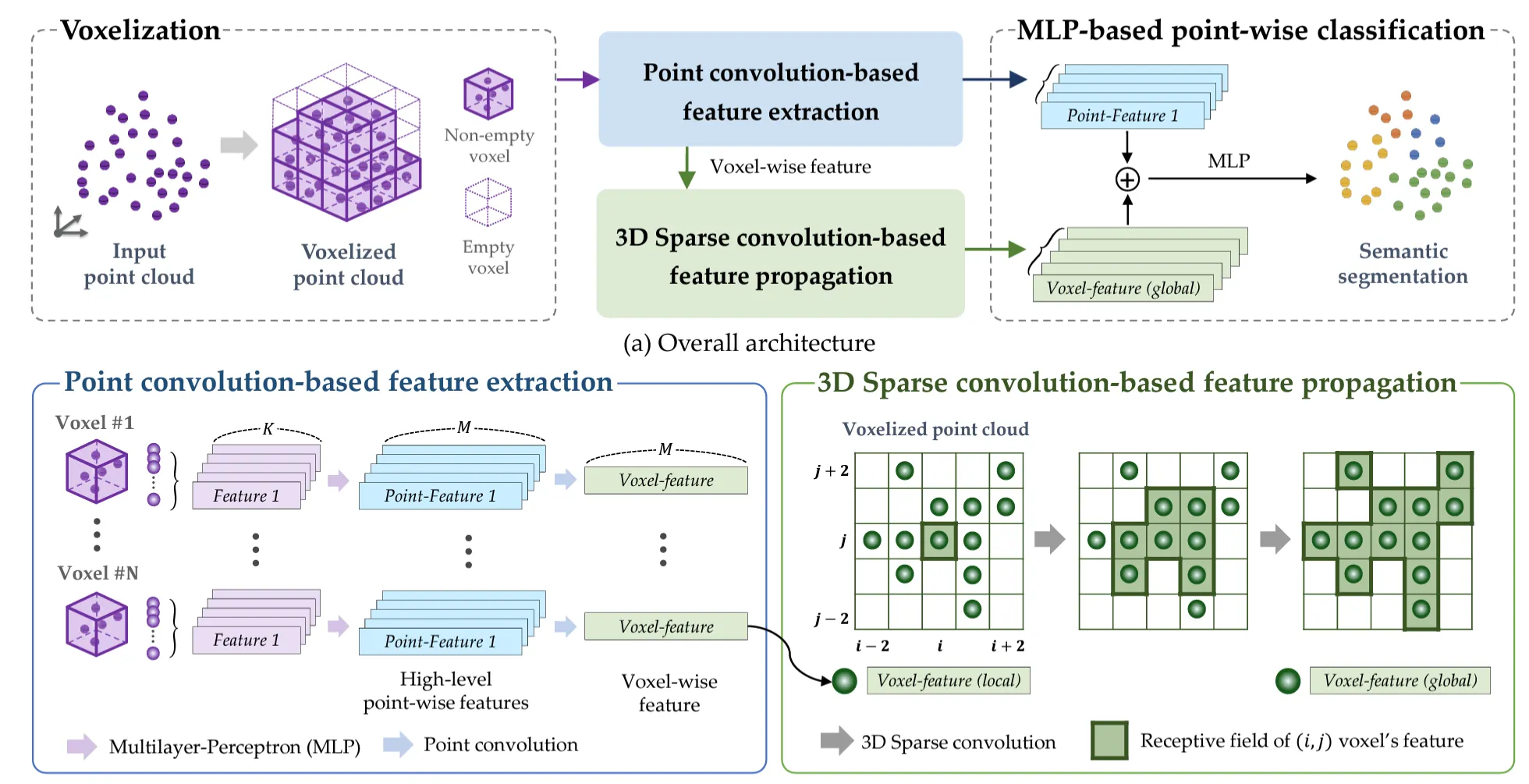
Semantic segmentation based on point convolution and 3D sparse convolution to reduce the amount of computation (PCSCNet)
Vision-based Semantic Segmentation
•
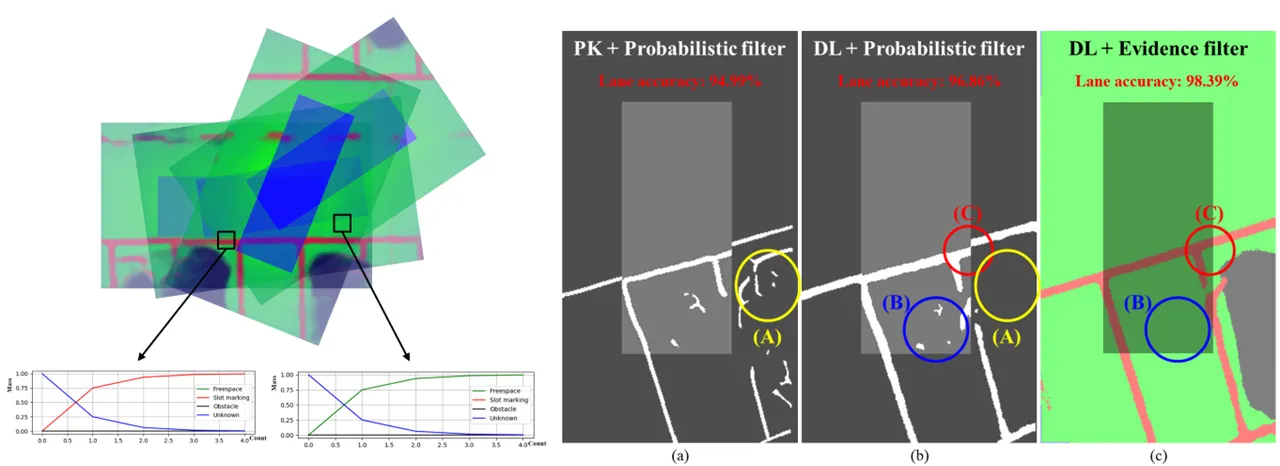
Improvement of semantic segmentation performance through accumulation based on Dempster-Shafer theory
Detection and Classification
LiDAR-based Object Detection/Tracking/Classification
•
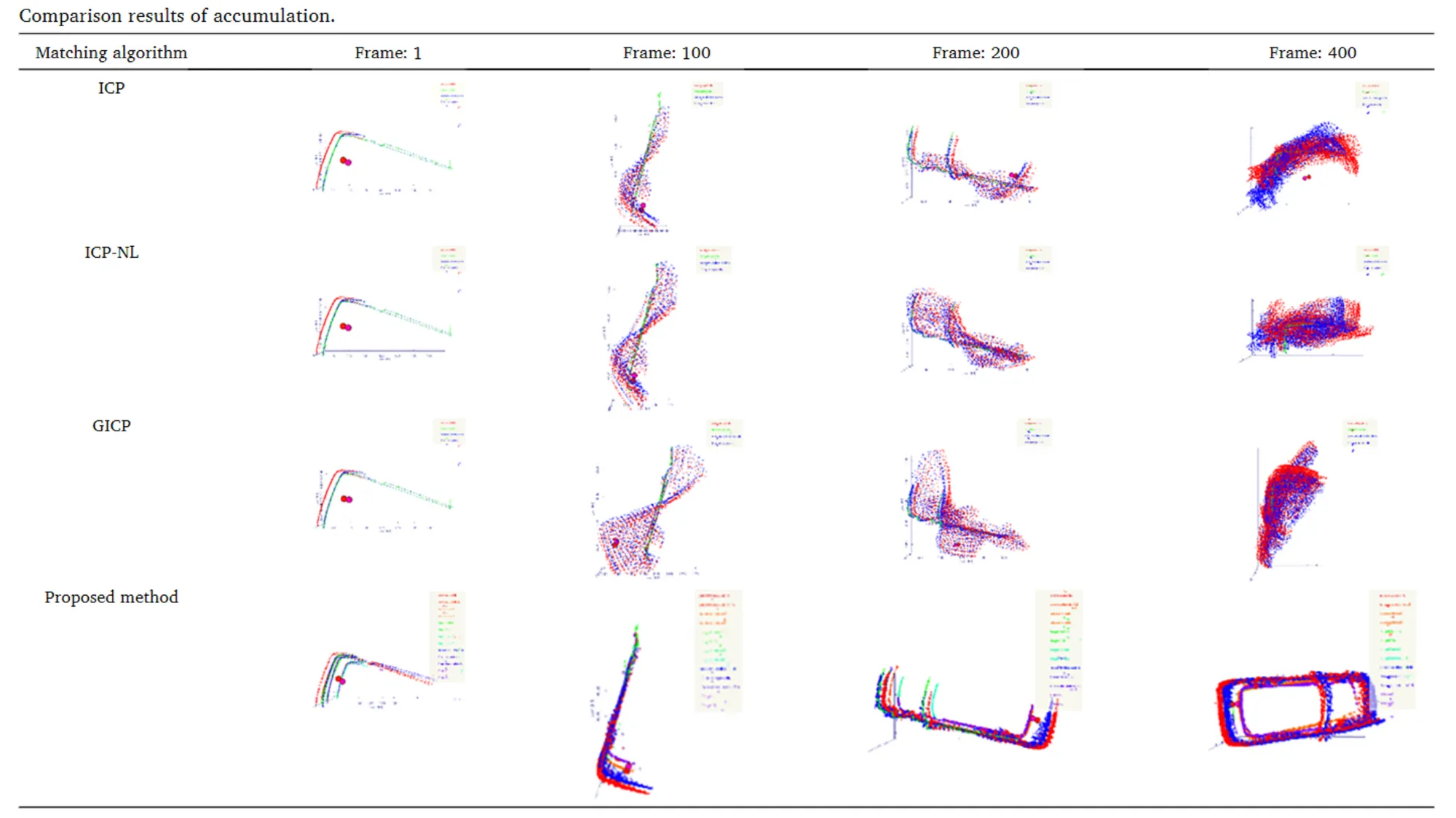
Dynamic object classification using LiDAR point cloud augmented by layer-based accumulation
Vision-based Landmark and Object Detection
•
Provides various static and dynamic environmental information around the platforms

